Эволюция автомобильных радаров в истории
С каждым годом количество автомобилей в мире стремительно увеличивается. В 2010 году число действующих автотранспортных средств перевалло за миллиард. По оценкам Международной Ассоциации производителей автомобилей (OICA), в 2015 году было в эксплуатации около 947 миллионов легковых и 335 миллионов коммерческих автомобилей [1]. Объем продаж автомобилей в 2020 году составил 78,49 миллионов единиц. Предполагается, что к 2035 году количество автомобилей в мире достигнет 2 миллиардов.
Каждый год в мире в результате дорожно-транспортных происшествий (ДТП) теряют жизнь около 1.2 миллиона людей [2]. Согласно ГИБДД, в России за первые 9 месяцев 2021 года было зарегистрировано 96314 ДТП. В результате этих аварий погибло 10516 человек, а еще 121573 получили различные травмы и увечья [3]. По данным агентства NHTSA, в 90% случаев ДТП происходят из-за действий водителя. Основными причинами ДТП являются нарушение правил дорожного движения, усталость, разговоры по мобильному телефону и другие подобные факторы.
Для предотвращения травм и смертей начиная с конца 50-х годов автомобили стали оснащаться ремнями безопасности. Сейчас автомобильная промышленность стремится к достижению нулевого уровня смертности. Для этой цели в автомобили внедряются дополнительные системы безопасности:
- пассивные: подушки безопасности, активные подлокотники, специальная конструкция кузова и т.д.
- Технологии, которые активно применяются: антиблокировочная система, система устойчивости курса, система распределения тормозных усилий и другие.
С 90-х годов ХХ века появились технологии активной безопасности в автомобилях, которые используют данные с ультразвуковых датчиков, камер, лидаров и радаров.
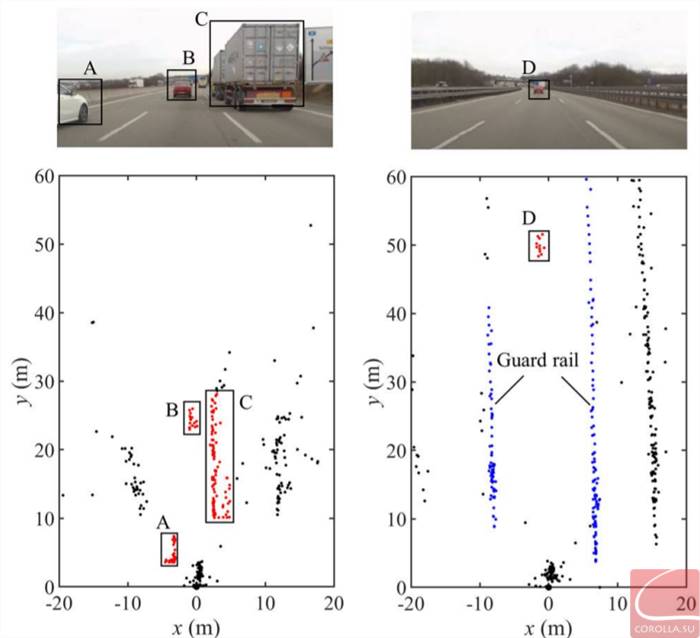
Каждый из трех датчиков имеет свои преимущества и недостатки. Например, камеры используются для обнаружения и распознавания различных объектов на дороге: инфраструктуры, автомобилей, пешеходов, а также для определения границ дороги. Однако следует отметить, что качество работы камеры снижается в плохих погодных условиях, что может негативно сказываться на точности измерения дальности и скорости. Более того, дальность обнаружения объектов камерой зависит от настроек объектива и матрицы, что означает, что камера не всегда может работать с одинаковой точностью на больших и малых расстояниях. С другой стороны, лидары обеспечивают высокое разрешение изображения, но, как и камеры, сталкиваются с проблемами при плохих погодных условиях. Более того, дальность действия современных лидаров ограничена до 150 метров. Большим недостатком лидаров является использование механического сканирования, что негативно сказывается на их надежности. Наконец, автомобильные радары позволяют прямое измерение дальности и скорости объектов на дороге. Кроме того, радары не страдают от плохих погодных условий. Отмечается, однако, что радары не могут распознавать различные классы объектов. На рисунке 1 показан результат работы радара в декартовых координатах [3].
На автомобильные радары можно разделить на две основные категории: радары для дальнего действия и радары для ближнего действия. Радары для дальнего действия обладают узким углом обзора в плоскости горизонта (несколько градусов) и имеют большую дальность. Они используются для создания адаптивных круиз-контрольных систем, систем экстренного торможения и систем stop&go. Радары для ближнего действия имеют широкий угол обзора в горизонтальной плоскости. Они применяются для систем помощи при перестроении и контроля слепых зон. Важными характеристиками радара являются дальность действия, центральная частота, зона обзора, ширина луча по направлению и углу наклона.
Факторы, влияющие на дальность действия радара, включают мощность сигнала и характеристики/размеры наблюдаемого объекта. Требования к дальности действия радара определяются требованиями к системам помощи водителю. Как правило, радар способен обнаружить легковой автомобиль на расстоянии около 200 метров, а пешехода — на расстоянии от 120 до 150 метров.
Рабочая длина волны, определяемая центральной частотой радарного сигнала, в конечном итоге влияет на размеры самого устройства. Если длина волны излучаемого сигнала меньше, то антенна может быть меньшего размера при сохранении зон обзора и ширины луча по азимуту и углу места. В 2005 году Европейский институт телекоммуникационных стандартов установил европейские стандарты для автомобильных радаров, работающих на частоте 76-77 ГГц (ETSI EN 301 091). В 2010 году Российская Федерация также выделила полосу 76-77 ГГц для автомобильных радаров [5]. При несущей частоте 77 ГГц длина волны равна 4 мм.
Возможность радара различать несколько объектов на одинаковой дальности, двигающихся с одинаковой скоростью, определяется шириной луча по азимуту. Например, если ширина полосы движения составляет 3 м, для того чтобы разделить 2 объекта на расстоянии 100 м необходимо, чтобы ширина луча по азимуту составляла 1,7 градуса. Ширина луча по азимуту зависит от линейных размеров антенны. С увеличением размера антенны, луч становится шире. У современных радаров ширина луча по азимуту составляет 1-1,5 градуса.
Разработка автомобильных радаров в первоначальной стадии происходила исключительно в научных целях, однако в последние десятилетия она приобрела практическую значимость и привлекла большие инвестиции. В данной статье представлен путь радаров от лабораторных прототипов до коммерческой продукции. Также рассмотрены ранние исследования и тенденции в данной области.
Историческая справка
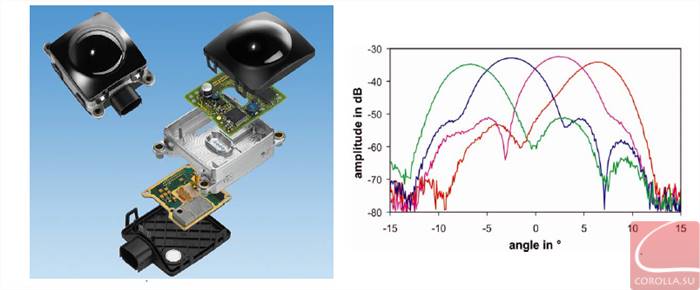
В конце 50-х годов ХХ века были проведены первые исследования в области автомобильных радаров. Разрабатываемые прототипы функционировали в диапазонах Х и Ku и использовали несущую частоту около 10 ГГц и 16 ГГц (см. рисунок 2, 3). Для зондирования объектов на прототипах применялись различные виды сигналов: импульсные, частотно-модулированные и линейно-частотно модулированные сигналы (FMCW). В радарах обычно формировался только один луч для обнаружения объектов. Однако экспериментальные примеры оказались слишком громоздкими для применения в серийных автомобилях.

В целях уменьшения размеров антенны, было принято решение увеличить рабочую частоту радаров до 35 и 50 ГГц. В 1972 году немецкое правительство субсидировало исследования и разработки систем предотвращения столкновений NTO-49, которые проводились в компании AEG-Telecunken в городе Ульм, Германия. Радар функционировал на частоте 35 ГГц. Для зондирующего сигнала использовался импульс, имеющий длительность в 10 нс. Установлена параболическая антенна с углом широковещательности около 2.5 градусов по азимуту. Радар имел дальность действия в пределах 100 метров. В качестве диодов для формирования сигнала использовались диоды Ганна и Шоттки. Увеличение несущей частоты позволило разместить радар на передней части автомобиля (см. рисунок 4).

Однако, использование данной системы было вынуждено прекратить по нескольким причинам. Первая причина – это протесты профсоюзов водителей США, которые возникли в связи с фактом хранения системой информации о передвижении автобусов. Вторая причина связана с тем, что автомобильные радары работали в одном диапазоне частот с полицейскими радарами, что приводило к взаимным помехам.

В 1999 году Mercedes-Benz представил первую коммерческую систему помощи водителю для пассажирских автомобилей. Она была разработана совместно с компанией Daimler и называлась «DISTRONIC». Система использовалась для реализации адаптивного круиз-контроля и устанавливалась на автомобили премиум-класса. Основой системы был радар компании Continental, который работал на частоте 77 ГГц (см. рисунок 6) [7].

Дальность работы радарного прибора составляла до 150 метров. Система в основном использовалась вне города для адаптивного контроля круиза, то есть для поддержания заданного расстояния до автомобиля, движущегося впереди. Через восемь лет была представлена система «DISTRONIC PLUS», включающая в себя радар дальнего действия с центральной частотой 77 гигагерц и два радара ближнего действия с центральной частотой 24 гигагерца (см. рисунок 7).

Такое использование подхода сделало систему пригодной для улично-дорожной сети в городе. В настоящее время такой подход начал находить применение не только в автомобилях премиум класса, но и в более доступных автомобилях.
Разработкой радаров для автомобилей в настоящее время занимаются много компаний: Bosch, Continental, Delphi, Veoneer, Valeo и другие. Наиболее популярными являются радары компании Bosch и Continental, которые устанавливаются на автомобили Mercedes-Benz и Volkswagen Group.
Развитие автомобильных радаров компании Bosch имело несколько поколений (см. рисунок 8).
В 2000 году компания Bosch представила первый автомобильный радар ACC1 (Adaptive cruise control). Радар был собран из отдельных компонентов, таких как генератор сигнала, СВЧ приемник и система цифровой обработки сигналов. Генератор сигналов был создан с использованием арсенида галлия (GaAs) в качестве технологии. Для достижения необходимого угла обзора применялась диэлектрическая линза. Размеры радара составляли 124х91х97 мм, вес — 600 грамм, центральная частота — 77 ГГц, дальность действия — до 150 метров, а угол обзора — 8 градусов [7, 12].
В 2004 году был представлен радар второго поколения ACC2 (см. рисунок 9).
В системе радара использовался один широкий луч для передачи сигнала и 4 приемных луча, которые формировались с помощью диэлектрической линзы в аналоговом формате. Для исследования использовался сигнал с изменяющейся треугольной частотой. ACC2 весил 300 граммов и имел угол обзора в 16 градусов. По сравнению с предыдущим поколением радара, его дальность была увеличена до 200 метров. Размеры ACC2 сократились до 73x70x60 мм.
В 2009 году было представлено новое (третье) поколение радара дальнего действия (Long Range Radar) LRR3 (см. рисунок 10).

В ходе интеграции в кремниево-германиевую (SiGe) микросхему был добавлен высокочастотный тракт. Обработка сигналов выполнялась на специальной ASIC-микросхеме. Радар имел дальность действия 250 метров и сектор обзора в 30 градусов. Его вес составлял 285 грамм, а габаритные размеры — 77x74x58 миллиметров. Максимальное количество контролируемых объектов составляло 32 [13].
В последующих версиях радаров компания Bosch перешла на планарную технологию, отказавшись от использования диэлектрической линзы. В 2013 году был представлен радар ближнего действия для контроля ситуации по бокам автомобиля. Его дальность действия составляла 160 метров, а угол обзора составлял ±45 градусов (см. рисунок 11 a) ).
Размеры LRR4 — четвертого поколения радара дальнего действия составляли 101x78x62 мм, а вес радара — 240 г. Он имел возможность контролировать до 24 объектов одновременно. Для своей работы радар использовал несколько зон: дальняя зона с углом обзора ±6 градусов и дальностью до 200 м, а также ближняя зона с углом обзора ±20 градусов и дальностью до 5 м. В ближней зоне радар контролировал транспортные средства, въезжающие или покидающие зону обзора [14].
В пятом поколении радаров компании Bosch используется монолитная интегральная СВЧ микросхема (MMIC), которая содержит три передатчика и четыре приемника (см. рисунок 11 b)). Обработка сигналов осуществляется на отдельном микроконтроллере. Этот радар является первым у Bosch, в котором присутствует возможность оценки высоты. Дальность его действия составляет до 210 м, угол обзора по азимуту — ±60 градусов, по углу места — ±15 градусов. Размеры радара — 63x72x19 мм.
Самым популярным радаром компании Continental стал радар ARS404/ARS408, выпущенный в 2012 году (см. рисунок 12). Этот радар использует антенную решетку MIMO с 4 передатчиками и 12 приемниками. Использование нескольких передатчиков и приемников работающих совместно позволяет уменьшить ширину луча радара (увеличивает точность определения угловых координат) без увеличения размеров самого устройства. Радар имеет два режима работы: ближний радар с шириной обзора 60 градусов и дальностью действия около 20 метров, а также дальний радар с шириной обзора 4 градуса и дальностью действия в 250 метров. Для радиочастотного модуля и цифровой части радара используются отдельные микросхемы. Радар способен одновременно обнаруживать и отслеживать до 32 объектов. Радар устанавливается на автомобили компаний Volkswagen Group, BMW и т. д.

Текущие тренды
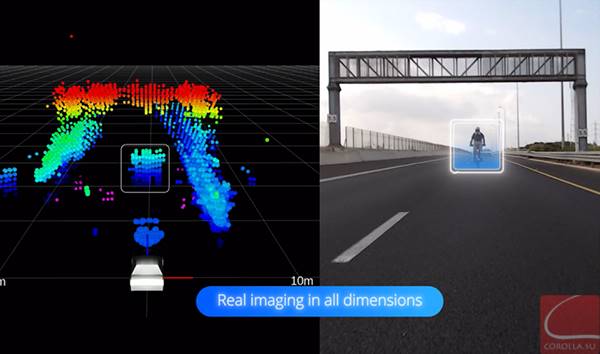
Возможности развития автомобильных радаров огромны. Существует множество стартапов, занимающихся созданием автомобильных радаров. В настоящее время активно развивается новое поколение автомобильных радаров — 4D-imaging радары. Imaging радары позволяют оценить обстановку в широком диапазоне углов по азимуту. При этом, такие радары обладают высоким разрешением в плане дальности, скорости, азимута и угла места. Один из самых известных представителей этого класса устройств — радар от компании Arbe (см. рисунок 13).
Радар-антенная решетка включает 48 передающих и 48 приемных каналов. Разрешающая способность радиуса составляет до 7,5 см, азимута — 1 градус, а угол наклона — 1,5 градуса. Качество изображения, получаемого от радара, приблизительно равно качеству изображения, получаемого с помощью лидара (см. рисунок 14).
В текущем 2020 году, компания Arbe успешно привлекла инвестиции ихами в размере 32 млн. долларов США, что является очень важным достижением для данной компании. Уникальная особенность этого процесса заключается в использовании imaging радаров, которые также разрабатывают и другие известные компании, такие как, например, Bosch, Continental, Vayyar, Smartmicro, Mobileye, Uhnder, Zendar и многие другие. Для того, чтобы предоставить клиентам максимально качественные и новейшие проектные решения, в 2021 году компания Huawei представила собственный imaging радар, оснащенный 12 передатчиками и 24 приемниками. Главной особенностью данного преобразователя является его широкий угол обзора, который составляет 120 градусов в горизонтальной плоскости и 30 градусов в вертикальной плоскости. Кроме того, данный радар обладает дальностью действия вплоть до 300 метров, что является весьма впечатляющим показателем. Выходная информация, получаемая от imaging радара, представляет из себя 4D облако точек высокой плотности, что обеспечивает максимально точные и детализированные данные [16].
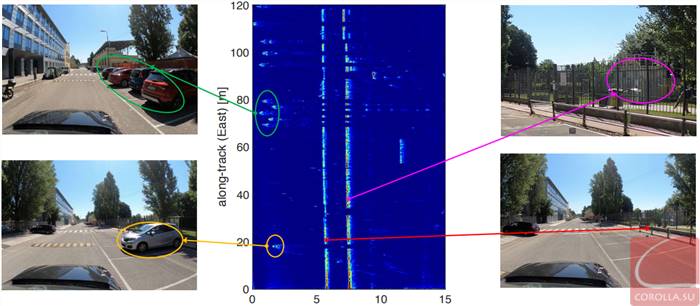
Сейчас активно разрабатываются автомобильные радары с синтезированной антенной (РСА) для улучшения точности определения местоположения автомобилей по глобальным координатам (GNSS). Они создают изображение, используя движение автомобиля для увеличения апертуры, и могут иметь разрешение до сантиметра. На рисунке 15 показан пример изображения, полученного с помощью автомобильного РСА-радара. На нем видны стационарные объекты, такие как припаркованные автомобили и забор. РСА-радары могут использоваться не только для получения карты окружающей среды независимо от GNSS, но и для помощи при парковке.
В текущее время автомобильные радары используют FMCW сигнал в качестве зондирующего сигнала, который генерируется в аналоговом формате. Компания Bosch прогнозирует, что до 2035 года автомобильные радары начнут использовать цифровые сигналы с ортогональным частотным разделением каналов (OFDM), как показано на рисунке 16.
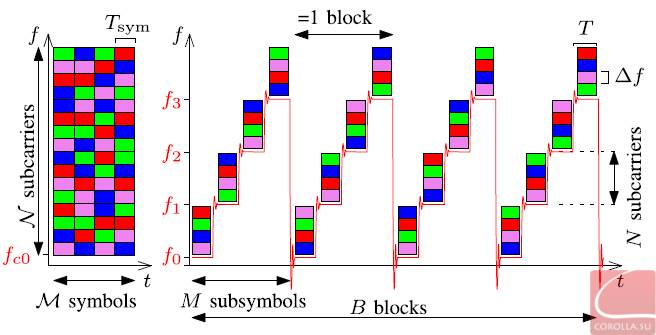
Преимущество данного типа сигнала состоит в том, что его форма полностью известна, что позволяет упростить передачу информации между радарами (обеспечить радиосвязь между автомобилями) и обеспечить согласованность (синхронизацию) между несколькими радарами, установленными на одной машине. В результате радары будут функционировать не только в моностатическом режиме, но и в бистатическом режиме, что позволит расширить область обнаружения, улучшить разрешающую способность по азимуту и углу наклона, повысить точность определения параметров объектов и т.д. Однако в отличие от FMCW-сигнала, использование OFDM требует обработки всей ширины излучаемой полосы, что в настоящее время экономически невыгодно.
Для оптимизации производительности радаров и обеспечения стабильности их работы применяются различные алгоритмы трекинга целей, включающие в себя кластеризацию, ассоциацию и фильтрацию координат. Для распознавания объектов обычно используются методы, такие как метод опорных векторов (SVM) или дерево решений. В последнее время все большую популярность приобретает применение машинного обучения в качестве дополнительного или альтернативного подхода к обработке сигналов. В связи с тем, что радары становятся все более точными, в отражении от объектов можно наблюдать облако точек. Использование машинного обучения может значительно улучшить анализ дорожной обстановки.
Заключение
Оценивая историю развития автомобильных радаров и текущие тенденции, становится очевидно, что они станут неотъемлемой частью будущих систем помощи водителю. Однако, системы помощи водителю, а тем более автономного вождения, не могут быть построены только на основе одного радара, камеры или Лидара. Объединяя информацию с разных датчиков, можно полностью оценить окружающую обстановку и принять обдуманное решение о дальнейших действиях.
Эта статья отражает личное мнение автора.
P.S. Это моя первая статья на Хабре. Я буду рад комментариям и критике. Если вам интересна эта тема, в следующей статье я расскажу о автомобильных радарах в России.
4. Zhaofei Feng и другие. Сегментация облака точек с использованием высокоточного автомобильного радара. AmE 2019. Дортмунд, Германия. Март 2019
5. Рекомендация Международного союза электросвязи (МСЭ) M.1452-2. Автомобильные радары для препятствия столкновений и системы радиосвязи в диапазоне миллиметровых волн для использования в интеллектуальных системах транспорта
6. Мартин Шнайдер. Автомобильные радары — текущее состояние и тенденции. Немецкая конференция по микроволнам GeMIC 2005
7. Х. Майнель и Юрген Дикманн. Автомобильные радары: от их происхождения к будущим направлениям. Журнал «Микроволновая волна», сентябрь 2013
8. Автоматическое вождение: безопасность и более эффективное будущее вождение. Издание 1, 2017 год
9. Хольгер Х. Майнель. Развитие автомобильных радаров — от самых первых шагов в будущее. 8-я европейская конференция по антеннам и распространению волн (EuCAP 2014). Гаага, Нидерланды. 6-11 апреля 2014 года
10.Philipp Ritter. Развитие полностью интегрированной системы автомобильного радара на кристалле в 22-нм технологии FD-SOI CMOS. Международный журнал микроволновых и беспроводных технологий, 2021 год
11.Juergen Hasch Движение к 2020 году: тенденции развития технологии автомобильного радара. Международная конференция IEEE MTT-S по микроволнам для интеллектуальной мобильности (ICMIM 2015), 27-29 апреля 2015 года
12.H.P. Groll и J. Detlefsen. История автомобильных антиколлизионных радаров и заключительный эксперимент по миллиметровому автомобильному радару, разработанному Техническим университетом Мюнхена. Журнал IEEE AES Systems, август 1997 года
13.Bosch Engineering Долгосрочный радар LRR3: Радарный датчик для железнодорожных применений. Bosch.
14.Chassis Systems Control Радарный сенсор дальнего действия четвертого поколения (LRR4). Bosch.
15. Христиан Вальдшмидт. Автомобильный радар — от первых попыток к будущим системам. IEEE Journal of Microwaves. Том 1, январь 2021 года.
17. Дарио Тальяферри и др. Навигационный автомобильный САР для высококачественного создания изображений дорожной среды. IEEE Access (Том: 9), 2021 г.